Section: New Results
Constraint-based Haptic Rendering of Multirate Compliant Mechanisms
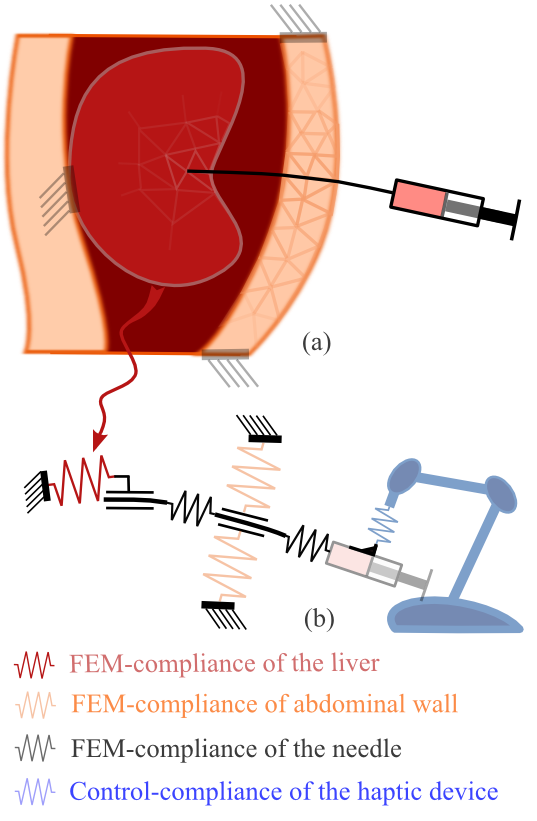
The research, that is published in IEEE transaction of Haptics [12] , is dedicated to haptic rendering of complex physics-based environment in the context of surgical simulation. A new unified formalism for modeling the mechanical interactions between medical devices and anatomical structures and for computing accurately the haptic force feedback is presented. The approach deals with the mechanical interactions using appropriate force and/or motion transmission models named compliant mechanisms. These mechanisms are formulated as a constraint-based problem that is solved in two separate threads running at different frequencies. The first thread processes the whole simulation including the soft-tissue deformations, whereas the second one only deals with computer haptics. This method builds a bridge between the so called virtual mechanisms (that were proposed for haptic rendering of rigid bodies) and intermediate representations (used for rendering of complex simulations). With this approach, it is possible to describe the specific behavior of various medical devices while relying on a unified method for solving the mechanical interactions between deformable objects and haptic rendering. The technique is demonstrated in interactive simulation of flexible needle insertion through soft anatomical structures with force feedback.